Update on TOHNKATSU
Woohoo! It's time for another update on my pet robot. In a previous post it was called Ardupi but I've now decided to call the robot TOHNKATSU. If you know Japanese or Japanese cuisine, you may know that tonkatsu (豚カツ) is Japanese pork cutlet, but TOHNKATSU has a 'H' in it. It's a tribute. And just to add a little flavour, I'm writing it in all caps. TOHNKATSU.
What's changed from the previous iteration?
Quite a lot, actually. For the mechanical design, I'm stacking the Arduino on top of the Raspberry Pi board to save some space. I got smaller breadboard too. In terms of electronics, the Arduino and Raspberry Pi are communicating over I2C. This post by Oscar Liang was extremely helpful for that. I also got a power bank to power the Raspberry Pi (which wasn't even in the previous design). And as usual, I operate the Pi remotely over SSH, either with a laptop or a smartphone, the latter for simple operations.
What does the TOHKATSU do?
Frankly speaking, not a whole lot, right now anyway. It's really just a remote-control car at the moment. I can command it to move forward and backward.
Future plans?
I'm going to write a bang-bang controller that tracks a reference heading. Ideally the robot will more-or-less move in a straight line this way. I know it's really simple, but I want to try it anyway. Following that, I may consider a standard PD or PID controller, again, for heading.
I also have an idea for a laser-point-following robot. You know those YouTube videos where the dog-owner points his/her laser pointer at the ground and the pet dog follows the point manically [link]? I want to write that behaviour on an autonomous vehicle.
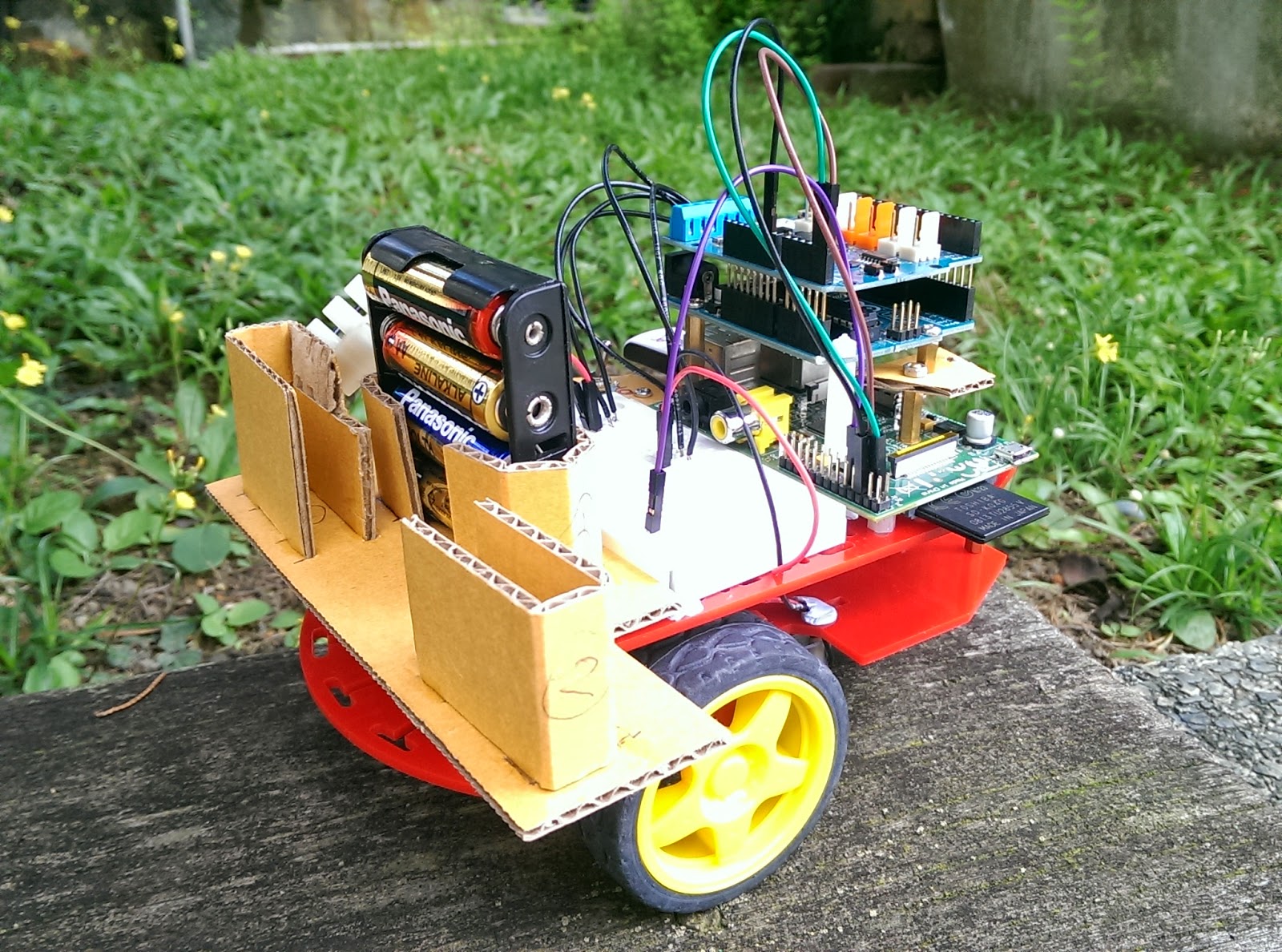 |
| TOHNKATSU, minus the smartphone and power bank |
What's changed from the previous iteration?
Quite a lot, actually. For the mechanical design, I'm stacking the Arduino on top of the Raspberry Pi board to save some space. I got smaller breadboard too. In terms of electronics, the Arduino and Raspberry Pi are communicating over I2C. This post by Oscar Liang was extremely helpful for that. I also got a power bank to power the Raspberry Pi (which wasn't even in the previous design). And as usual, I operate the Pi remotely over SSH, either with a laptop or a smartphone, the latter for simple operations.
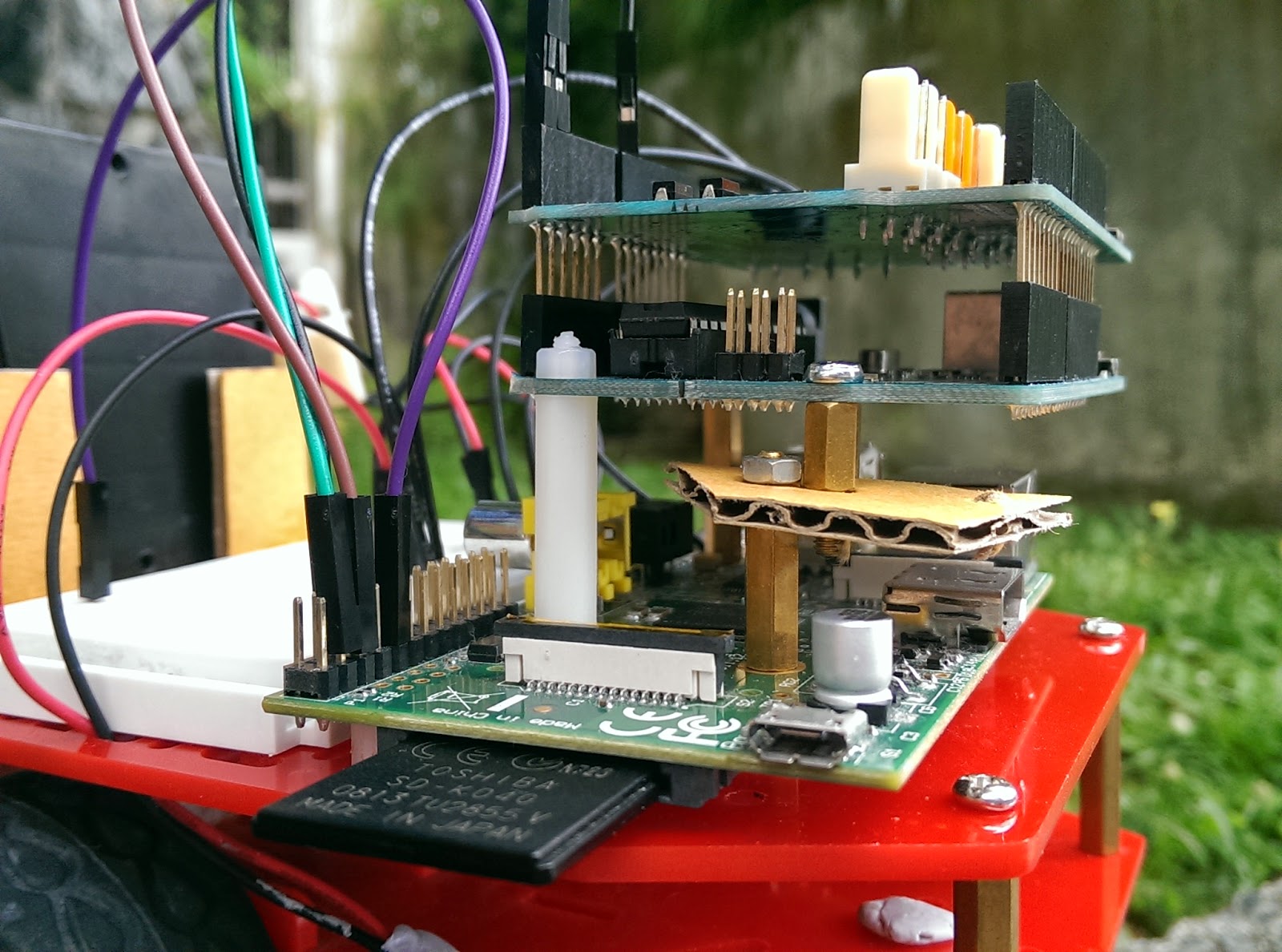 |
| Arduino stacked over the Raspberry Pi, like a boss. I'm going to swap that piece of corrugated cardboard for a 3D printed piece. |
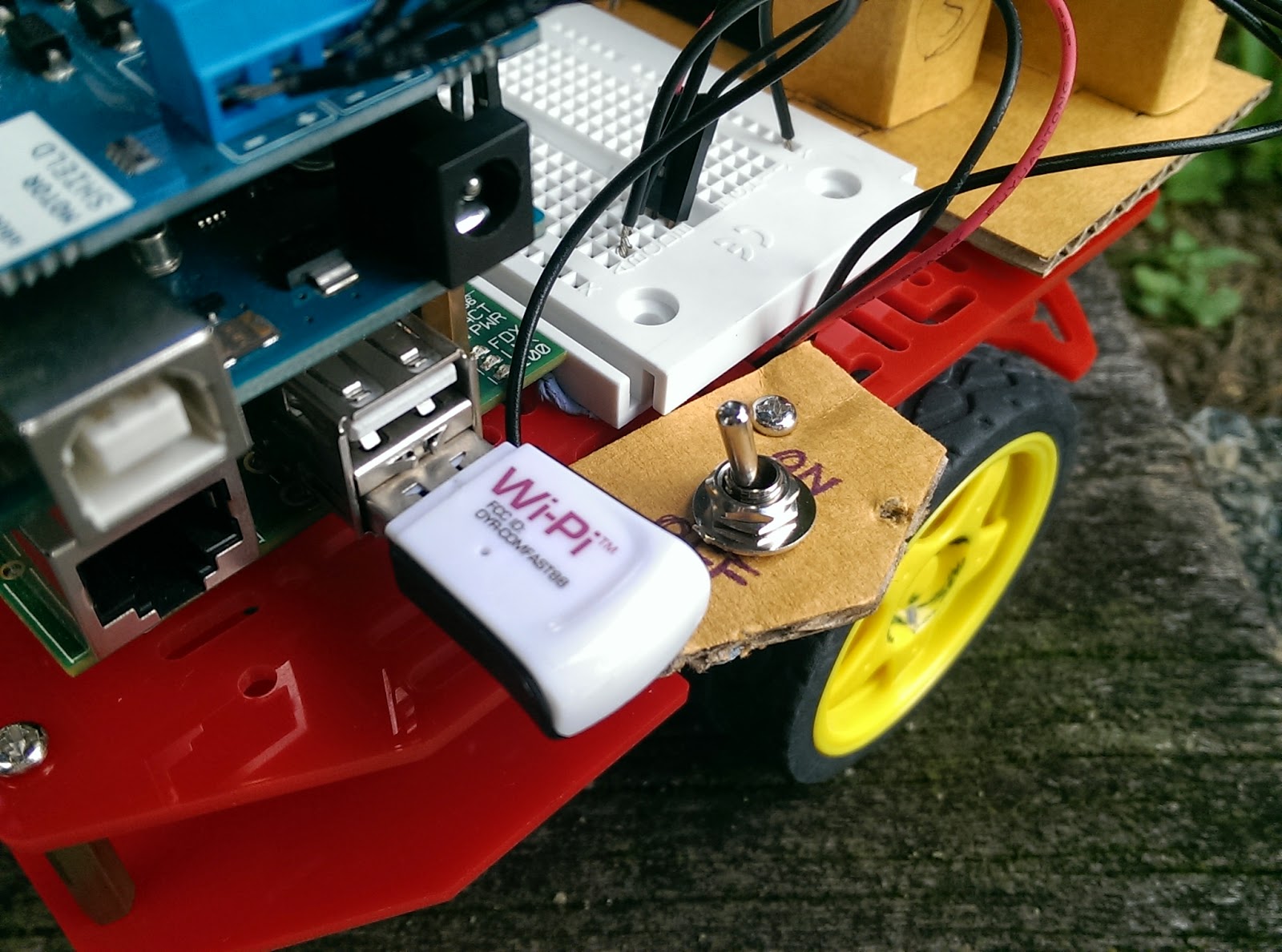 |
| It even has an on/off switch! How cool is that. No? OK. |
What does the TOHKATSU do?
Frankly speaking, not a whole lot, right now anyway. It's really just a remote-control car at the moment. I can command it to move forward and backward.
Future plans?
I'm going to write a bang-bang controller that tracks a reference heading. Ideally the robot will more-or-less move in a straight line this way. I know it's really simple, but I want to try it anyway. Following that, I may consider a standard PD or PID controller, again, for heading.
I also have an idea for a laser-point-following robot. You know those YouTube videos where the dog-owner points his/her laser pointer at the ground and the pet dog follows the point manically [link]? I want to write that behaviour on an autonomous vehicle.